科技日报记者 张梦然
英国利兹大学工程师开发了一款创新性的微型磁性机器人。它能在人体内深处执行3D扫描进行“虚拟活检”,并首次从胃肠道或肠道深处获取了高分辨率3D超声图像,这标志着早期癌症检测技术的重大突破。相关研究成果26日发表在《科学·机器人学》杂志上。
该机器人实现的“虚拟活检”,无需侵入性操作即可获得诊断数据,使得医生能够在单一程序中完成病变的检测、分期乃至潜在治疗。这一进展为多种癌症的诊断和治疗带来了革命性变化。
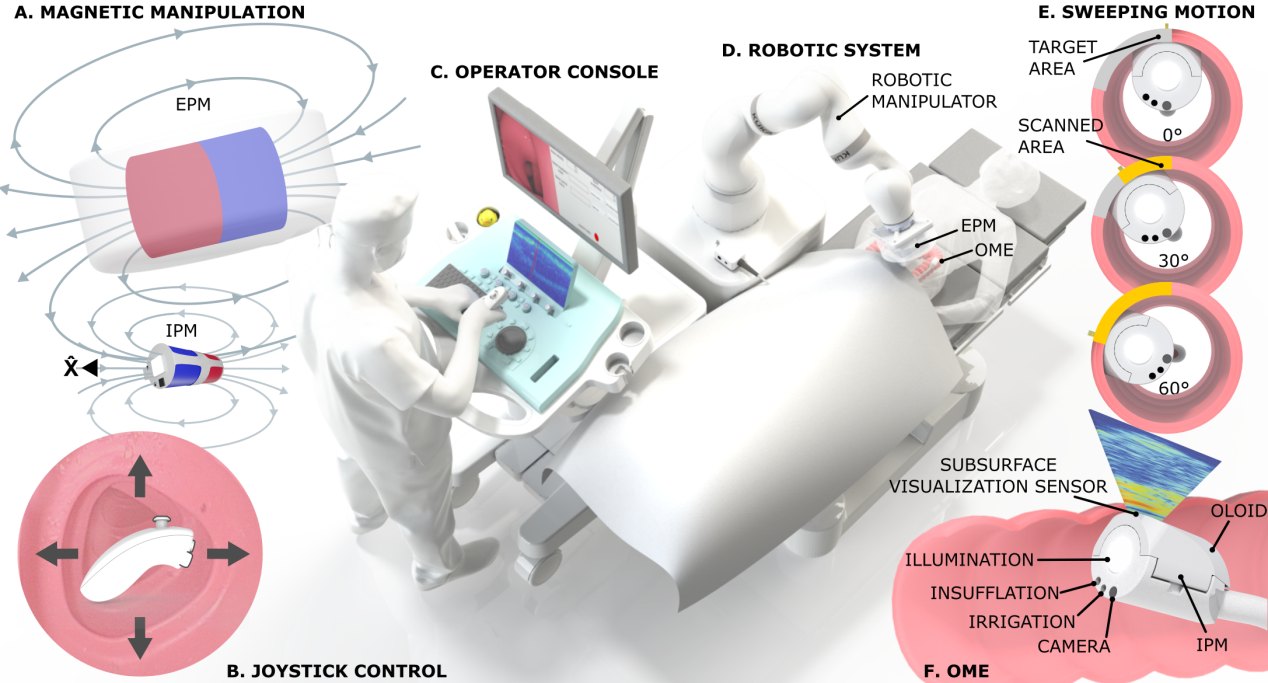
研究团队采用一种名为oloid的3D几何形状赋予了磁性医疗机器人前所未有的运动范围,包括滚动动作,这对于体内精确导航与成像是至关重要的。团队将oloid形状及其独特的滚动能力整合到一种新型的磁性柔性内窥镜中,并配备了一个小型高频成像装置,用于捕捉内部组织的详细3D图像。
这项技术首次让科学家能够重建来自肠道深处探针拍摄的3D超声图像,支持对结直肠癌进行原位组织分析与诊断,并立即得出结果。传统方法需要1到3周才能得到实验室结果,而新方法消除了诊断与治疗之间的等待时间,不仅提高了患者的舒适度,还减少了重复手术的需求,减轻了患者对潜在癌症诊断结果的焦虑。
该成像设备包含一个28MHz的微超声阵列,能够对其扫描区域进行高分辨率3D重建,让临床医生可以生成类似于标准活检产生的横截面图像。此外,高频/分辨率超声探头让用户能在微观层面观察特征,直至组织层的细节。
该内窥镜使用树脂3D打印而成,直径仅为21毫米,适用于结肠镜检查等实际临床应用。团队已经在模拟的人体结肠、食道及胃结构上测试了此系统,并进一步在人工结肠模型以及猪身上进行了实验,以符合医疗器械审批的监管要求。