科技日报记者 刘霞
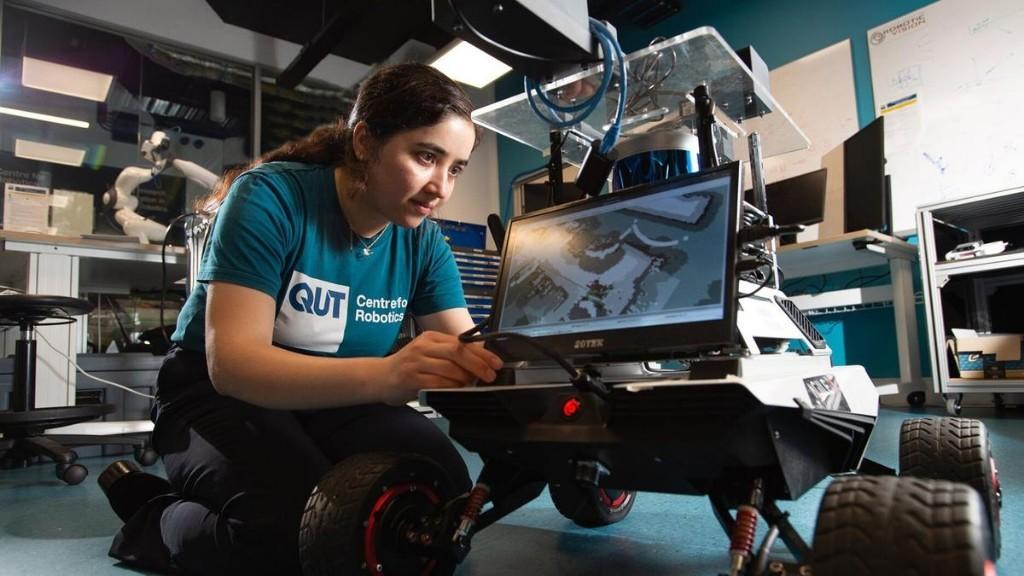
受动物大脑处理信息方式的启发,澳大利亚昆士兰科技大学团队基于尖峰神经网络开发出一种新型导航系统,有助构建出更智能的机器人。相关论文发表于最新一期《IEEE机器人学报》。
机器人在复杂现实环境中导航的能力仍然差强人意。此外,机器人通常需要依赖能耗大、计算要求高的人工智能系统进行训练,这无疑限制了它们的广泛应用。
尖峰神经网络是一种生物启发型的人工神经网络,设计灵感源于生物神经系统内神经元的工作方式。这种网络特别适合与神经形态硬件协同工作,可快速处理信息并显著降低能耗。
在新研制的导航系统内,这些尖峰神经网络如同一个个模块,彼此并不独立,而是集结成一个整体,协同工作。它们利用视觉输入信息来识别位置,从而完成导航任务。
这一模块化的方法具有诸多优势,比如增强了系统在不同光照、天气等条件下,识别出同一地点的能力。此外,新系统还通过图像序列而非单个图像,将位置识别准确率提高了41%。
团队在低功耗机器人身上对该导航系统进行了测试。结果显示,尖峰神经网络可显著降低计算成本。
团队表示,这一成果为在供电受限环境下工作的自主机器人提供了更高效、更可靠的导航系统,未来有望在太空探索和抢险救灾等领域发挥重要作用。