新华社记者 赵旭
北京航空航天大学实验室里,一只体态玲珑的仿生昆虫机器人自在穿梭,随后抵进一条狭窄的“死胡同”,由于空间限制没法腾挪掉头,它便倒着小步快跑了出来。
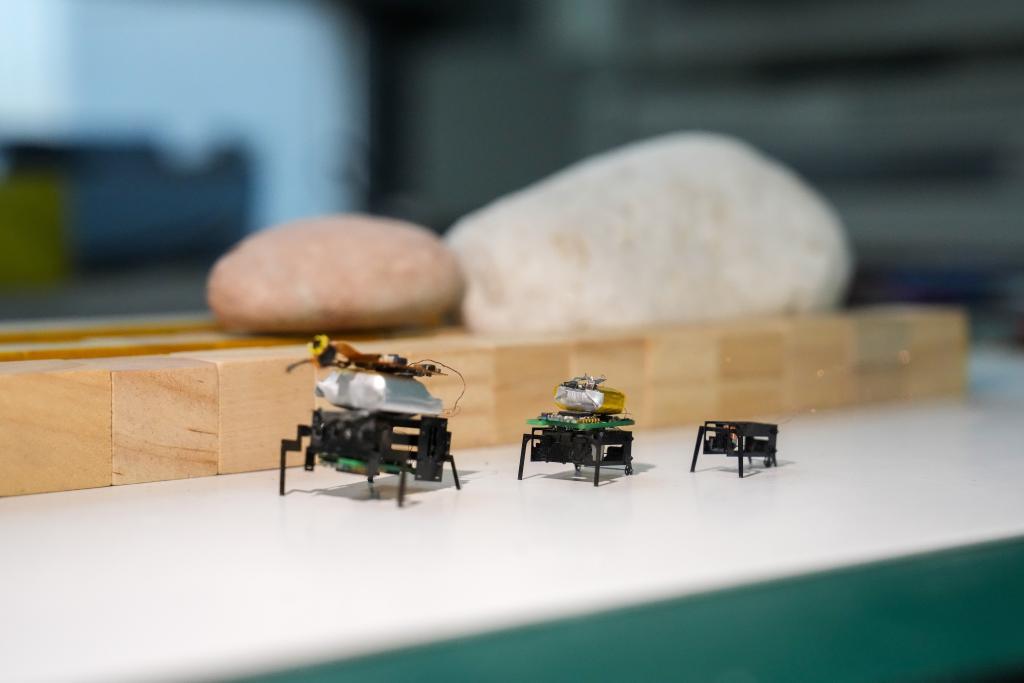
这只机器“昆虫”身长2厘米、宽1厘米、重不足2克,垂直投影面积约两个指甲盖大小,由北航教授闫晓军团队研发。它在灾后救援、机械装备结构检测等领域,应用前景广阔。
近日,该团队关于“昆虫机器人实现倒跑”的研究成果,登上了国际学术期刊《科学·进展》。这一刻,距闫晓军首次“牵手”微型机器人动力研究,已经过去15个春秋。

2009年,闫晓军作为青年访问学者参与“电压对微梁位移影响”的实验。他细心地观察到,直流电压升到一定范围时微梁发生了不间断的振动。依常理,只有交流电才会引发振动。由于这个“反常”现象与实验目的无关,在闫晓军指出后,其他实验人员并未再深入研究。
当时的一幕却在闫晓军的脑海里反复回放,“那种振动好像蜜蜂扑腾的翅膀!”航空动力领域出身的他联想到,接近蜜蜂尺寸的无人机体型过小,没法像普通无人机一样装载电机。正是因此,各国研究团队纷纷苦寻适配微型无人机的动力系统。“这种振动原理能否用在无人机的‘翅膀’上?”自此,闫晓军踏上了在这个方向的探索旅程。
欲学飞,先学走。“地上爬的动力机制弄明白了,才能用在飞行器上。就像活塞发动机最初是在汽车上使用,几十年后才成了飞机的动力源。”作为航空人,闫晓军深谙其中之道。
从探究明白“反常”现象背后的原理,到第一代机器“昆虫”雏形初现,8年时间一晃而过。“紧接着,你要让它在带着外接电线的情况下跑起来,然后要实现灵活转弯,在此基础上继续推进,让它能够脱线爬行,再脱线转弯。”闫晓军坦言,每进一步,背后都是浩繁的工程。
在航空动力学领域,搞传统的高温结构力学等方向的研究,似乎才是公认的“正业”。因此,团队曾在机器“昆虫”研究处于爬坡过坎的初期时,多次被外界质疑。
“那会儿确实听了有点伤心。”现已是北航副教授的刘志伟回忆,从读博到留校任教,他一直在闫晓军团队研究微型机器人动力系统。曾摆在团队面前的一根“最难啃的硬骨头”,他至今难忘——
没有外接电线供电,小小身躯怎样才能跑起来?“断开外接的电源,就意味着要在机器人身上搭载电池、电路板。实验发现,负重增加后,‘昆虫’寸步难移。”刘志伟说,三年时间里,团队设计了几十种机身新构型,调整了百余次参数,“但它的腿就像粘在了地上,纹丝不动。”
于是,深夜忙完,他总要坐在电脑前向动物们“请教”,一帧帧反复考究它们的运动步态。甲壳虫、蚂蚱、野马、兔子……最终,豹子成了打破僵局的关键变量。“豹子的弹跳奔跑给了我们灵感。”他一边回忆,一边松了口气。根据豹子的运动步态,团队最终设计出新一代仿生机器“昆虫”,实现了脱线爬行。
从零开始探索,到目前实现可控倒跑,这个团队反复“跌倒又爬起”,机器“昆虫”也在“摸爬滚打”中渐渐蜕变。
时光青睐有心人。团队的研究成果首次迎来井喷——今年,三项成果先后登上了国际权威学术期刊《自然》子刊、《自然》正刊以及《科学》子刊,这是15年来团队聚焦微型机器人动力研究的最高科研成果,得到学术界、产业界赞赏。
如今,从这一研究方向培养出的硕博毕业生已有16人,其中,最早的几批博士生有的已留校任教,并成长为副教授、教授,他们正带着一批又一批学生,接力深耕开拓。

“我们的终极目标,是要研发出扑翼式微型无人机,像蜜蜂一样飞起来。”今年51岁的闫晓军说,“也许还要等下一个15年,或许更久。”
蛰伏的机器“昆虫”,静待高飞。